F43-46RS with EM43-46
Programmable position indicator with magnetic encoder
Programmable position indicator to be combined with the magnetic encoder for rotative measure and integrated serial connection, which is used for linear or angular measurement, for a fast, efficient and safe format changeover and axes positioning.
➜ Easy to install, also suitable for difficult positions with remotable viewing.
Main features:
• Compact and robust cases made of anodized aluminum, stainless steel hollow shaft supported by ball-bearings
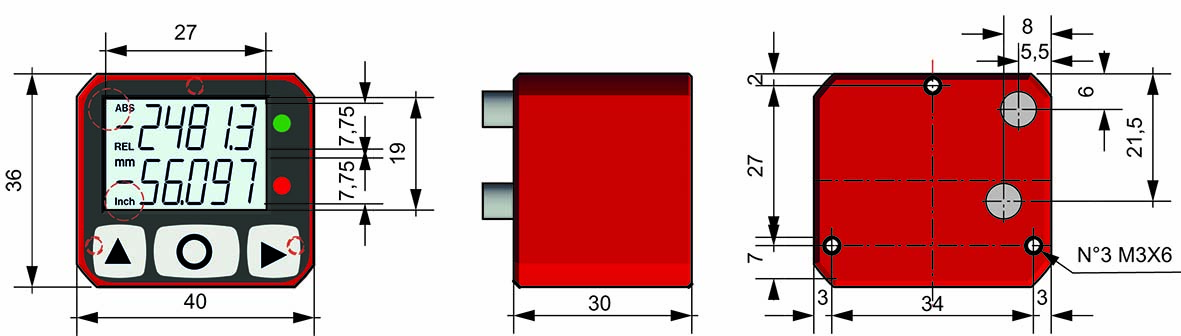
• The display has 7,5mm-high-digits, which allow excellent readability also from a distance.
Main functions:
■ Display with backlight and two rows: the first row shows the current position and the second row shows the target position.
The target value is sent to the unit via a serial interface from the PLC, allowing manual format changeover by the operator using a handwheel.
■ 2 LEDs, 1 green and 1 red, guide the operator until the correct position has been reached
■ All parameters are freely programmable via the integrated RS485 interface for networking with the PLC or a remote supervision system.
Photogallery



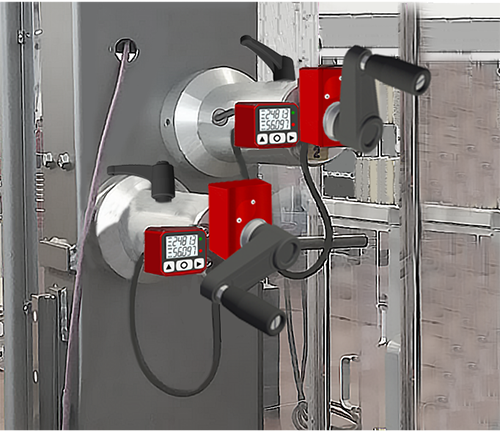
| APPLICATION EXAMPLES |
 |
|
|
| EM43 |
 |
| EM46 |
 |
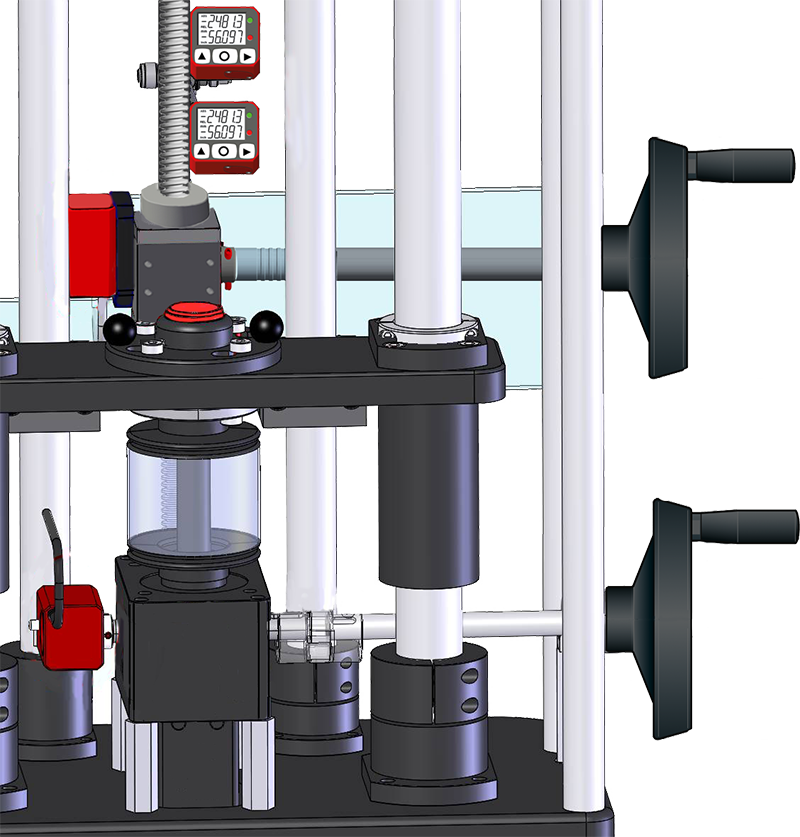
| F43-46RS |
 |
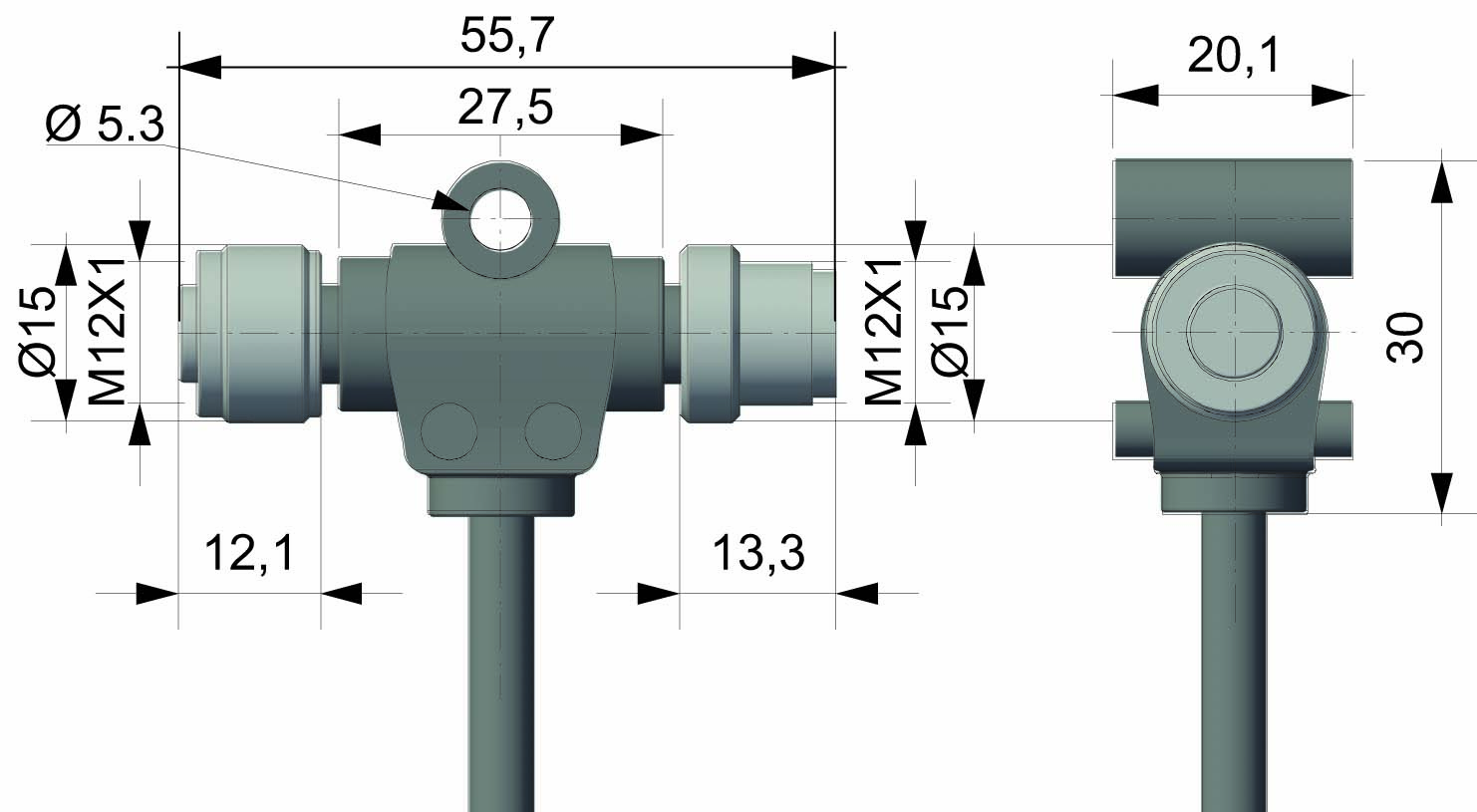
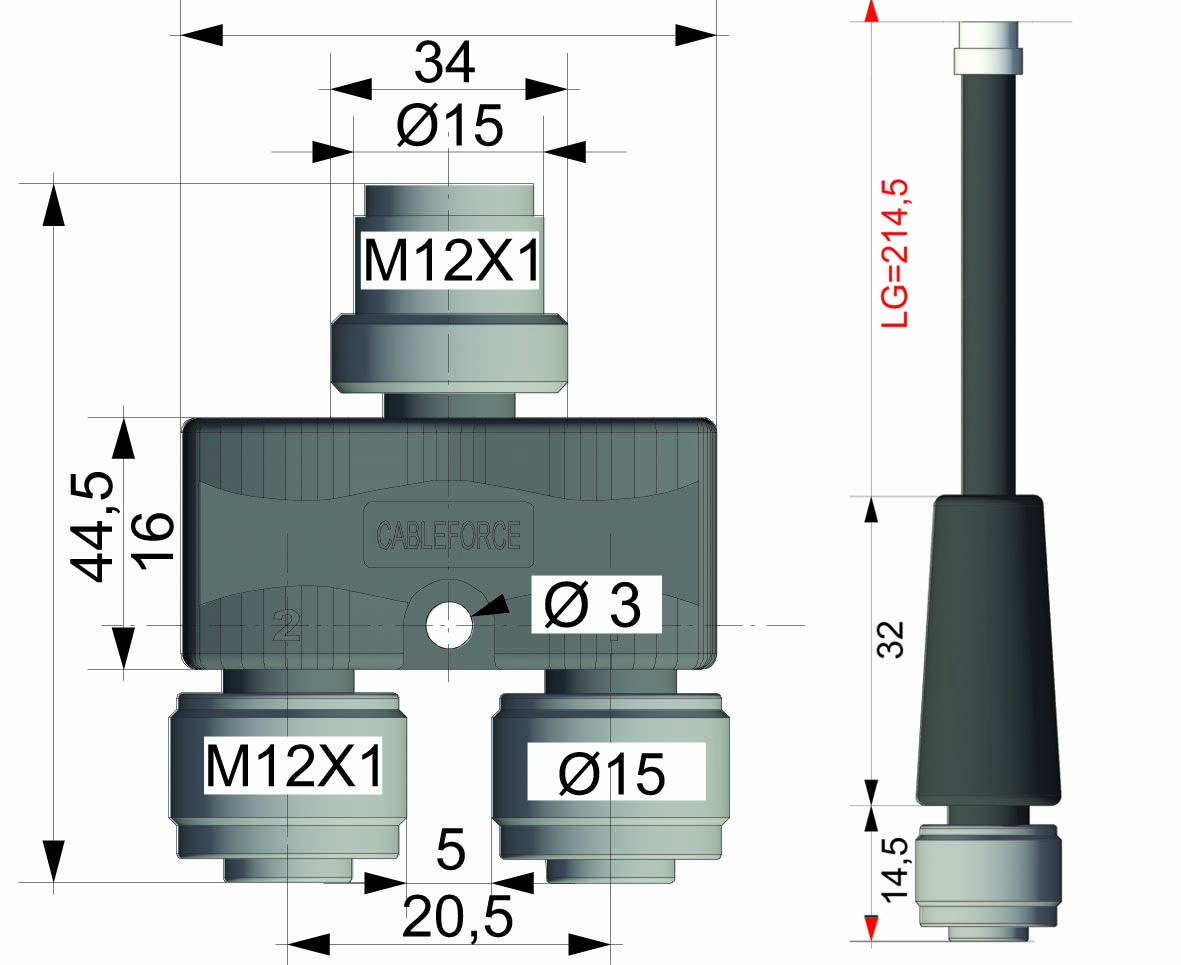
| CONNECTOR «M12T» (standard) | |
 |
 |
| CONNECTOR «M12Y» (optional) | |
 |
 |
| MOUNTING POSITION "A" | |
 |
|
| for horizontal shafts, to be positioned at a height between 50cm and 120cm |
| For optimal visibility, orient the unit based on the viewing angle as shown in the images |

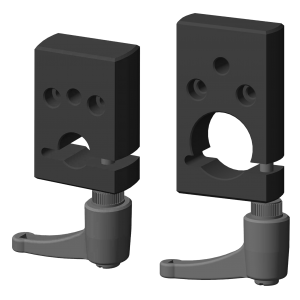
Shaft block flange FLB-EP43 - EP46
made in anodised aluminum with handle for a safe locking of the drive shaft.
| DIMENSIONS | |
 |
|
| FL-B EP43 | FL-B EP46 |
| Ø A =14 - 12,7 (1/2") | Ø A = 20 - 19,5 (3/4") - 25 |
| B = 55 | B = 65 |
| C = 22 | C = 30 |
|
|
 |



Protocol converter which connects the EP4_RS and F4_RS displays to Profinet, Ethernet/IP, Powerlink, and EtherCat networks.
➜ for more complete information, see Gateway
Richiedi l'accesso
F4RS_EM43 46 

Click here to download
F4RS_EM43 46 
Click here to download
F4RS_EM43 46 

Click here to download
EP4-F4 datasheet.pdf

Click here to download >
EP4_F4 user manual_1.3_ing-1.pdf
Click here to download >