MAR40
Gatos mecánicos a husillo carriles
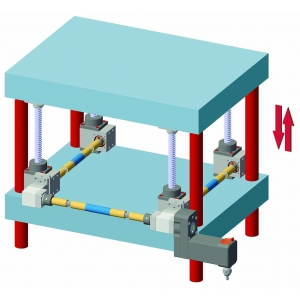
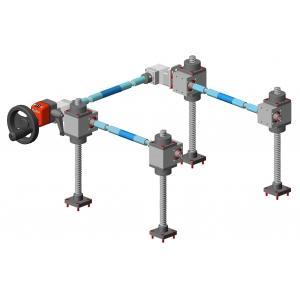
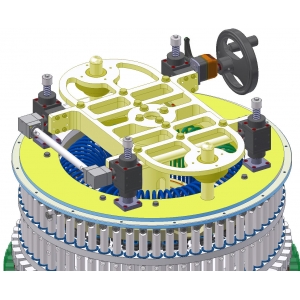
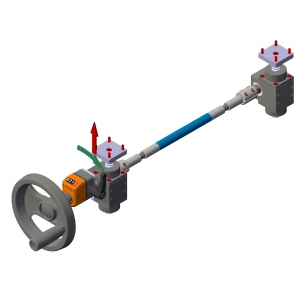
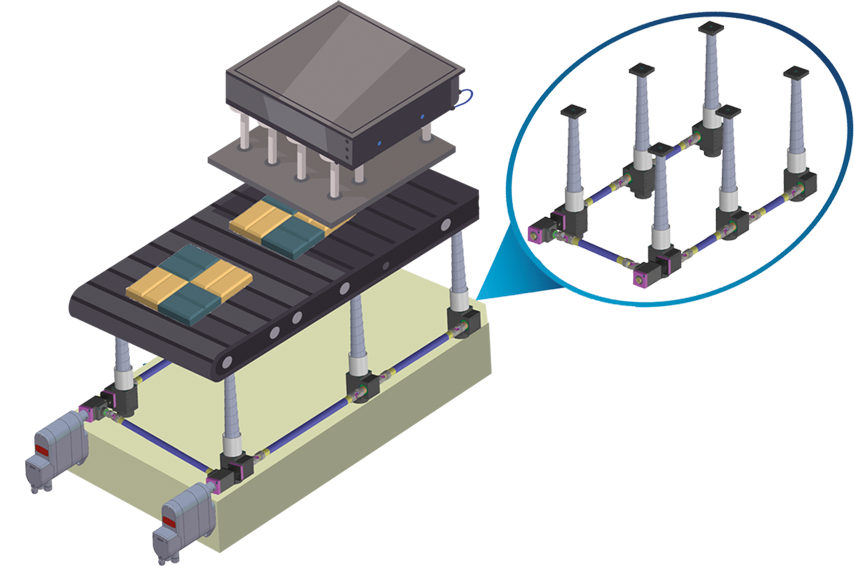
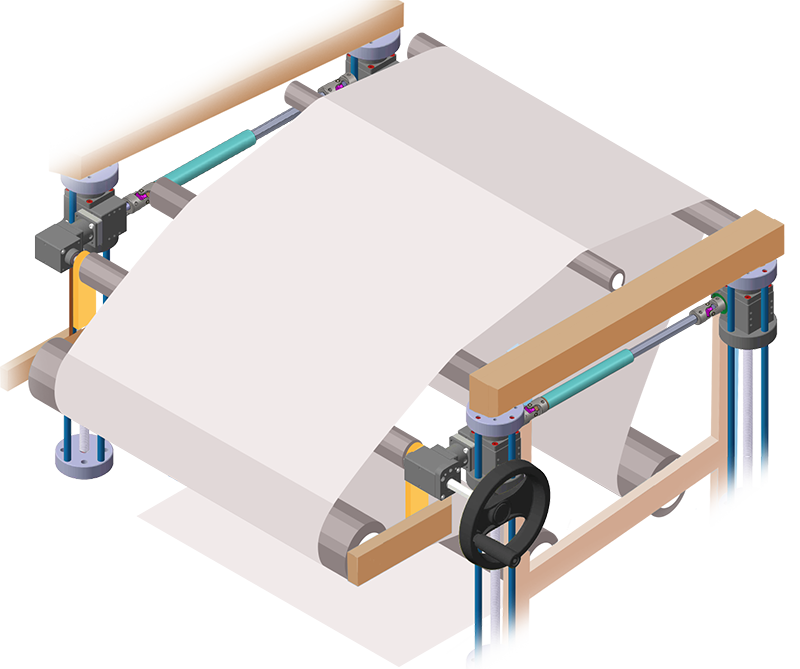
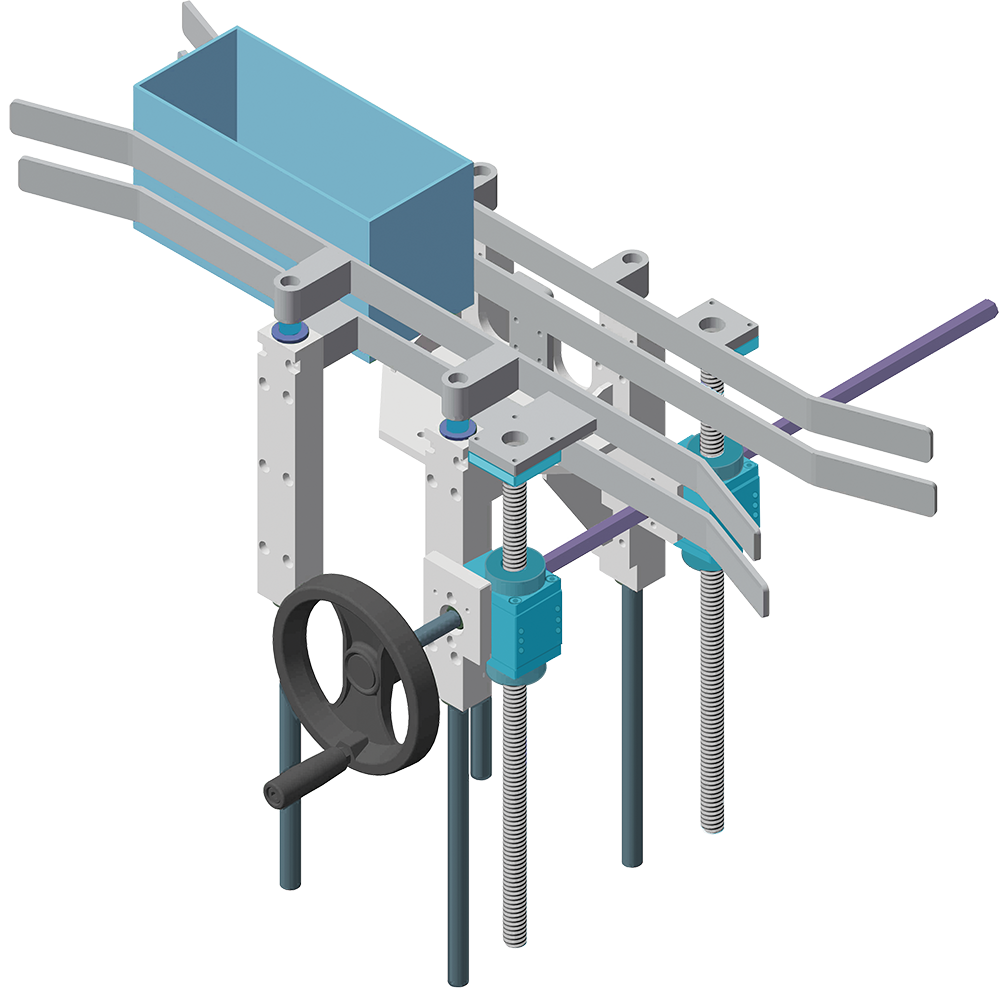
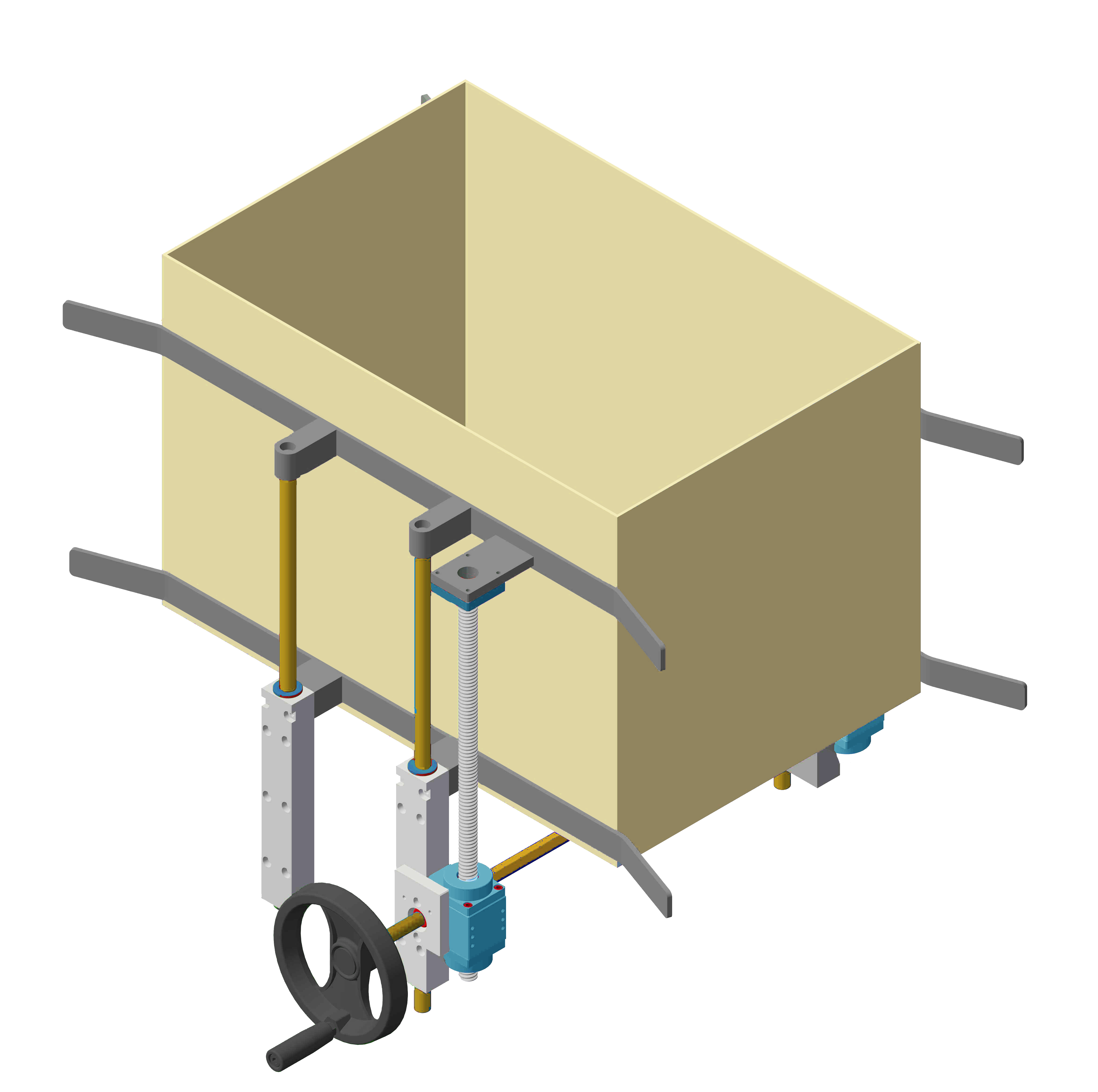
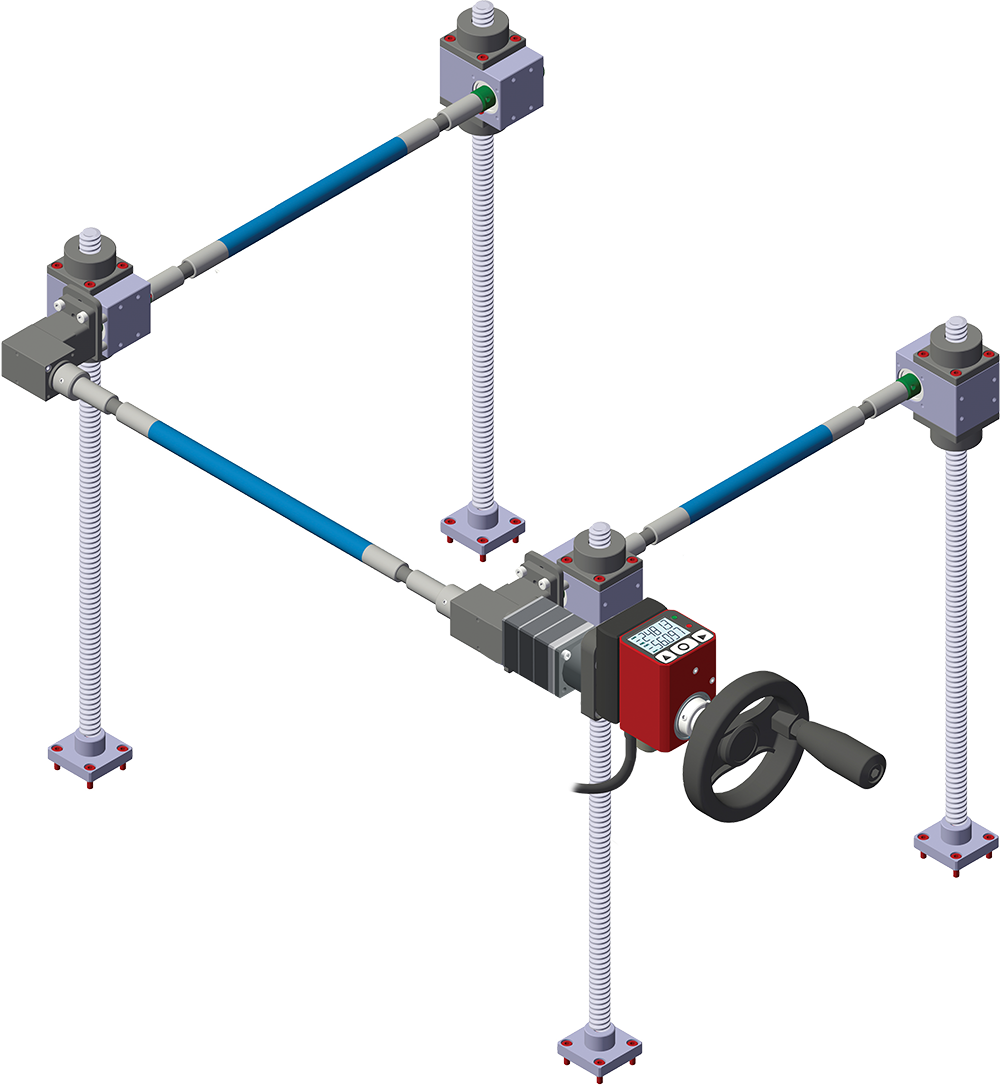
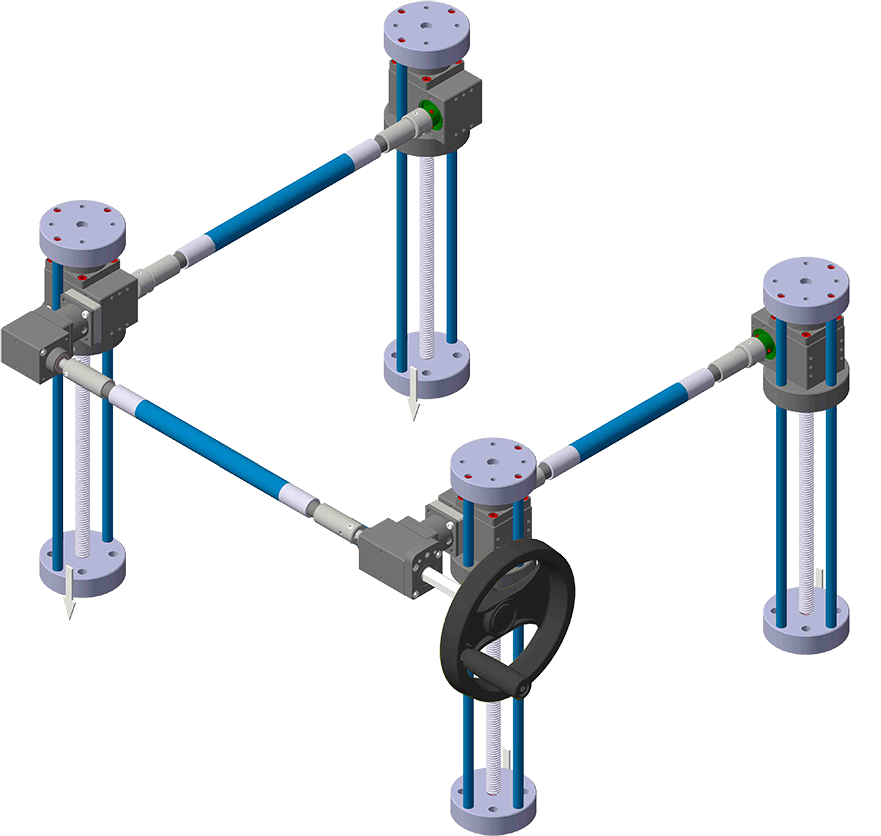
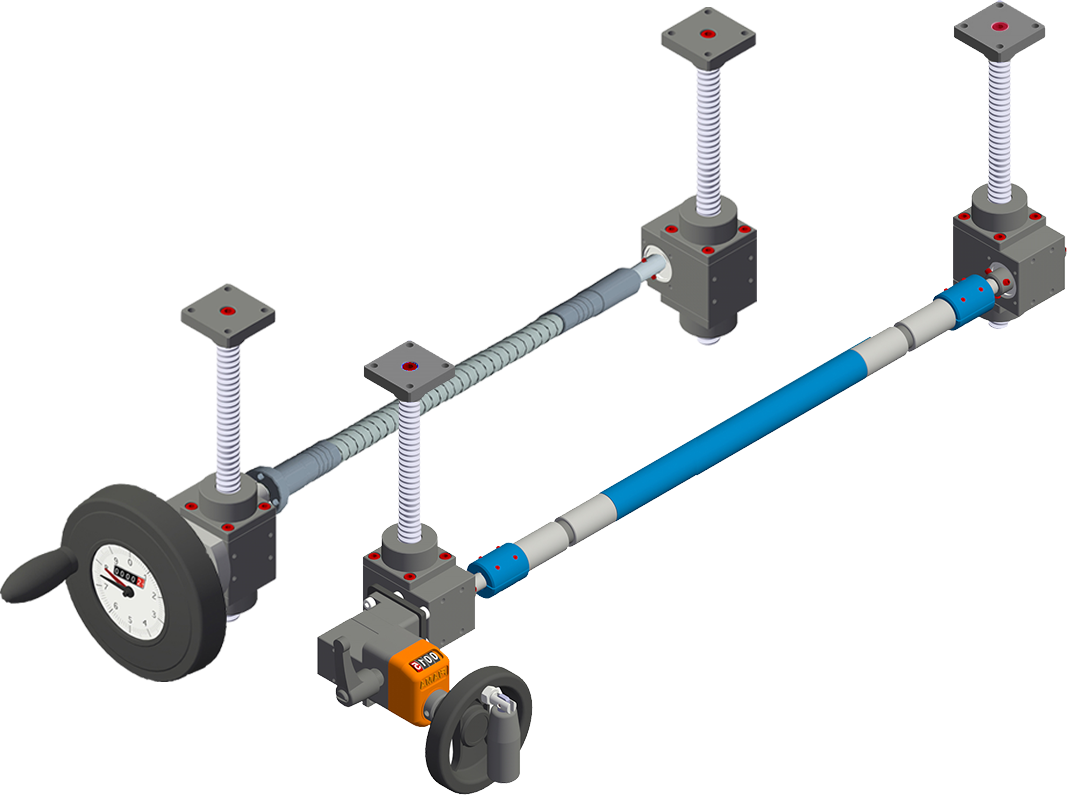
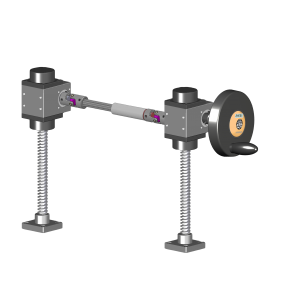
Sistema de construcción modular para una solución completa y versátil, los gatos mecánicos permiten transformar un movimiento de rotación en un movimiento lineal de elevación y/o translación “en tracción o empuje.”
• Husillo Trapezoidal en acero inox AISI 304, rosca TPN Ø14 - paso 4 mm
• Cárter en aluminio anodizado, árboles y engranajes en acero endurecidos con tratamiento superficial con elevada resistencia al desgaste
• Lubrificados con grassa larga vida Klüber, no necesitan de manutención
• Longitudes estándar carrera de tornillo trapezoidal en mm: 100 - 200 - 300 - 400 - 700 - 1000
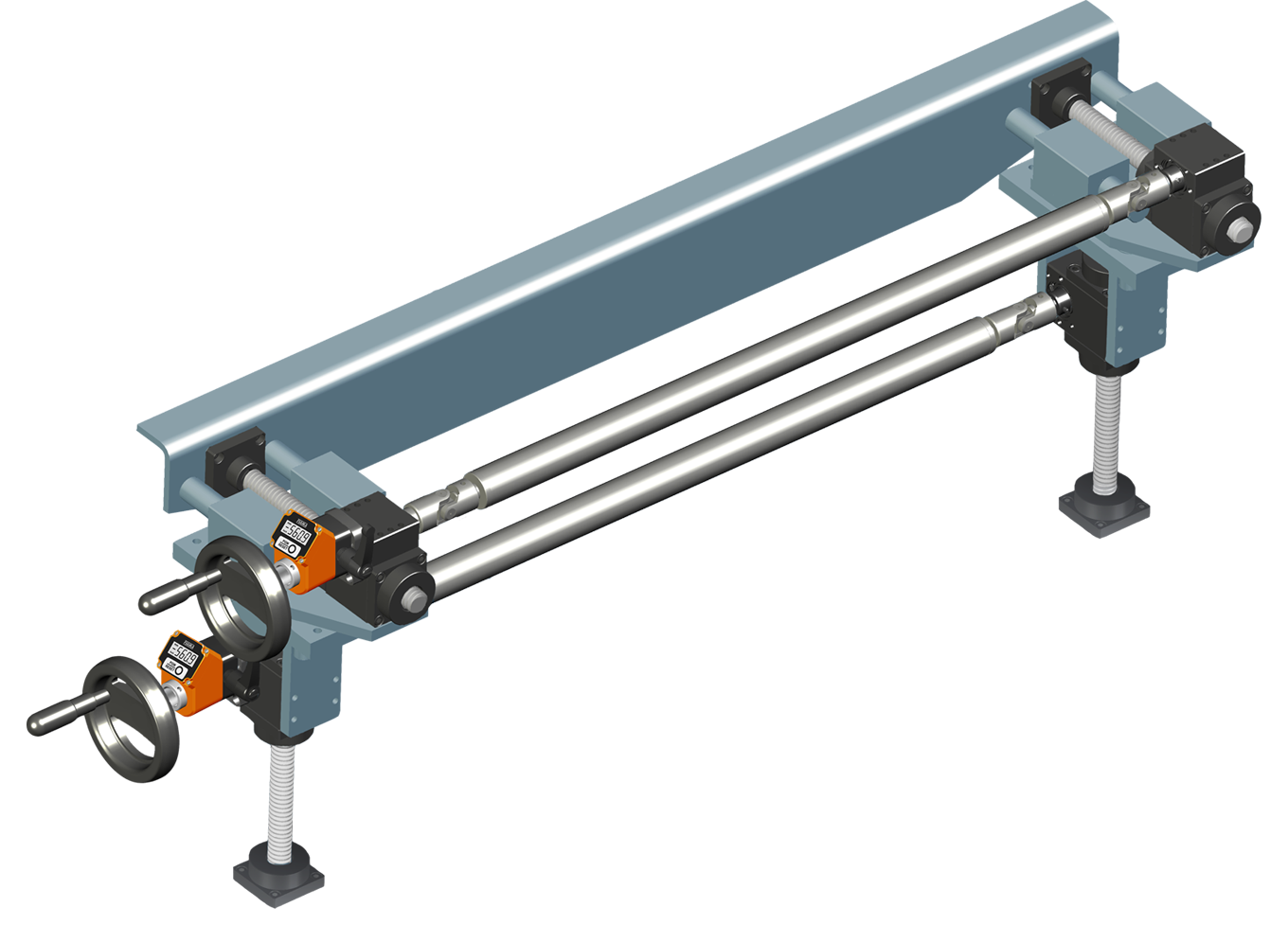
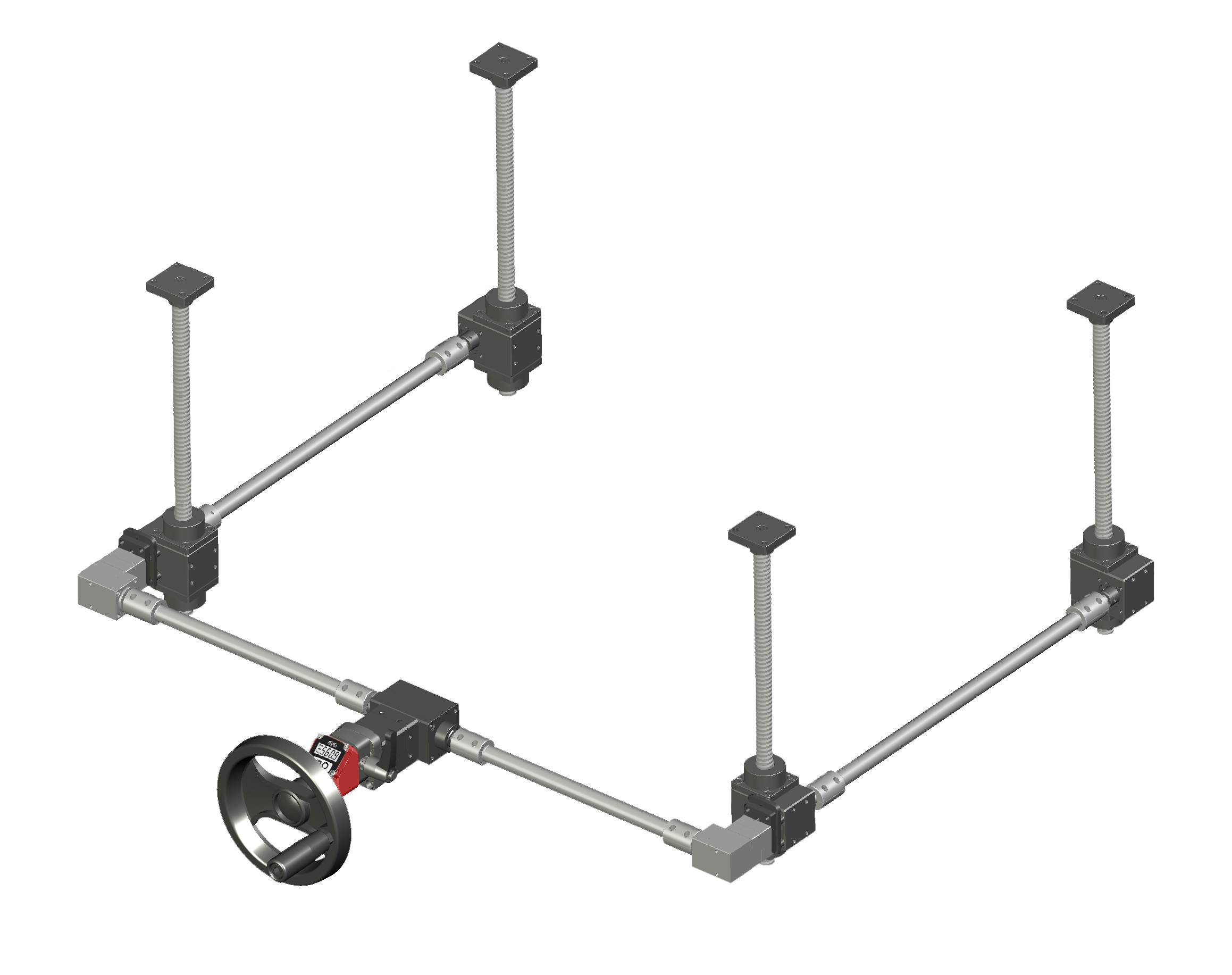
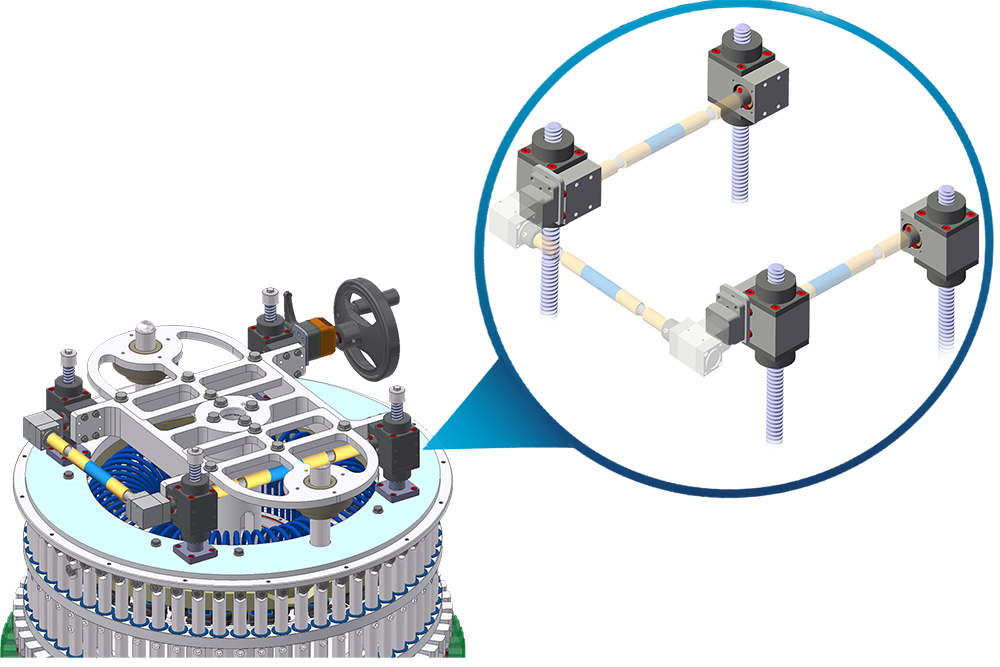
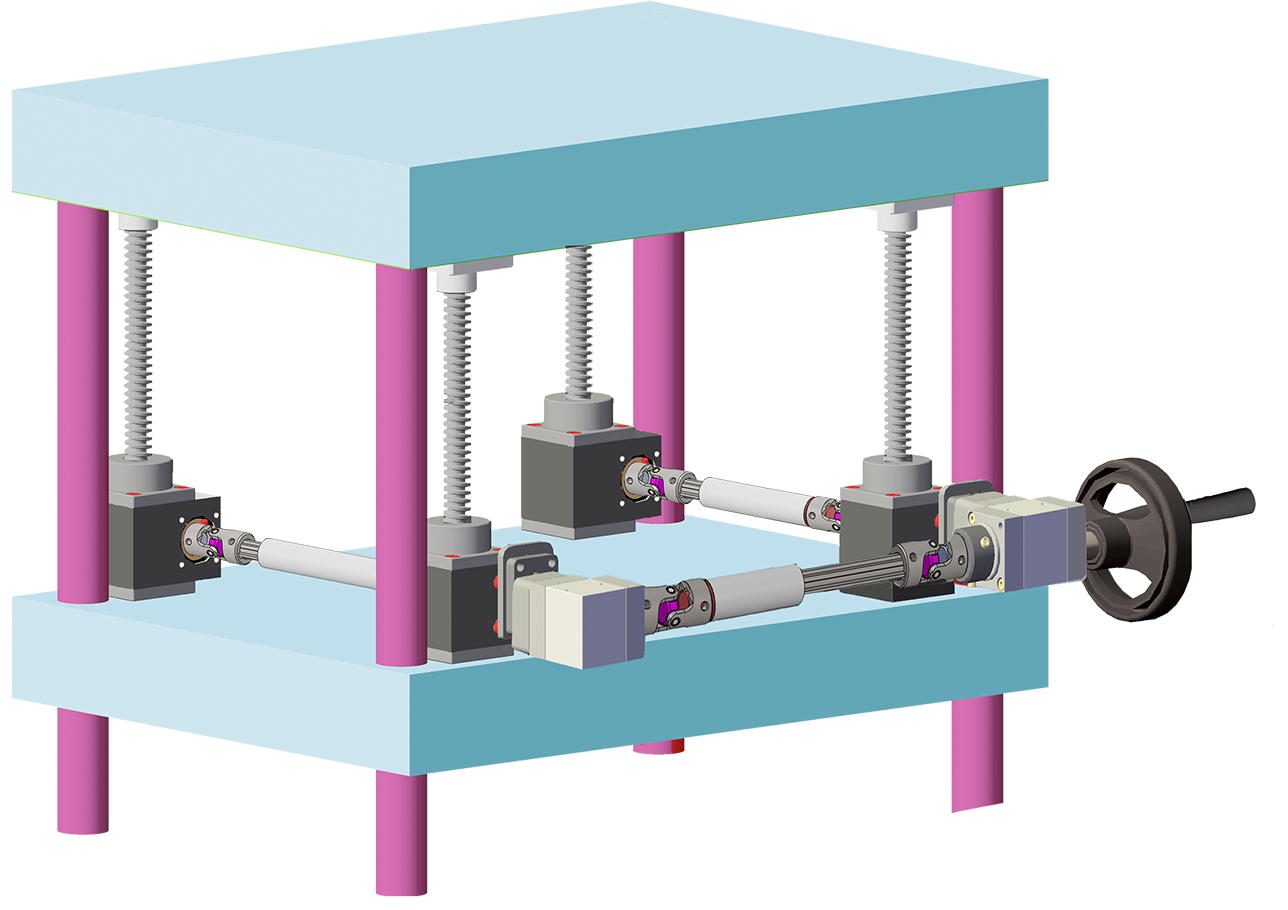
• Pueden ser utilizados singularmente o en grupos oportunamente colegados mediante árboles, ranuras y/o reenvíos a ángulo
• Movimiento manual o motorizado
Disponible bajo petición:
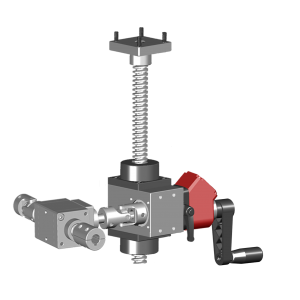
■ Se suministra completo con brida de fijación y extensión de eje para visualización con indicador digital „OP3“ digital y programable „EP3“
(ver dimensiones totales MAR40 FL-OP3)
■ Protección rígida en aluminio (opcional en inox) con muelle espiral en acero inox AISI 303 hasta longitudes de 400mm
Galeria de fotos







|
EJEMPLOS DE APLICACIÓN |
 |
 |
.png) |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
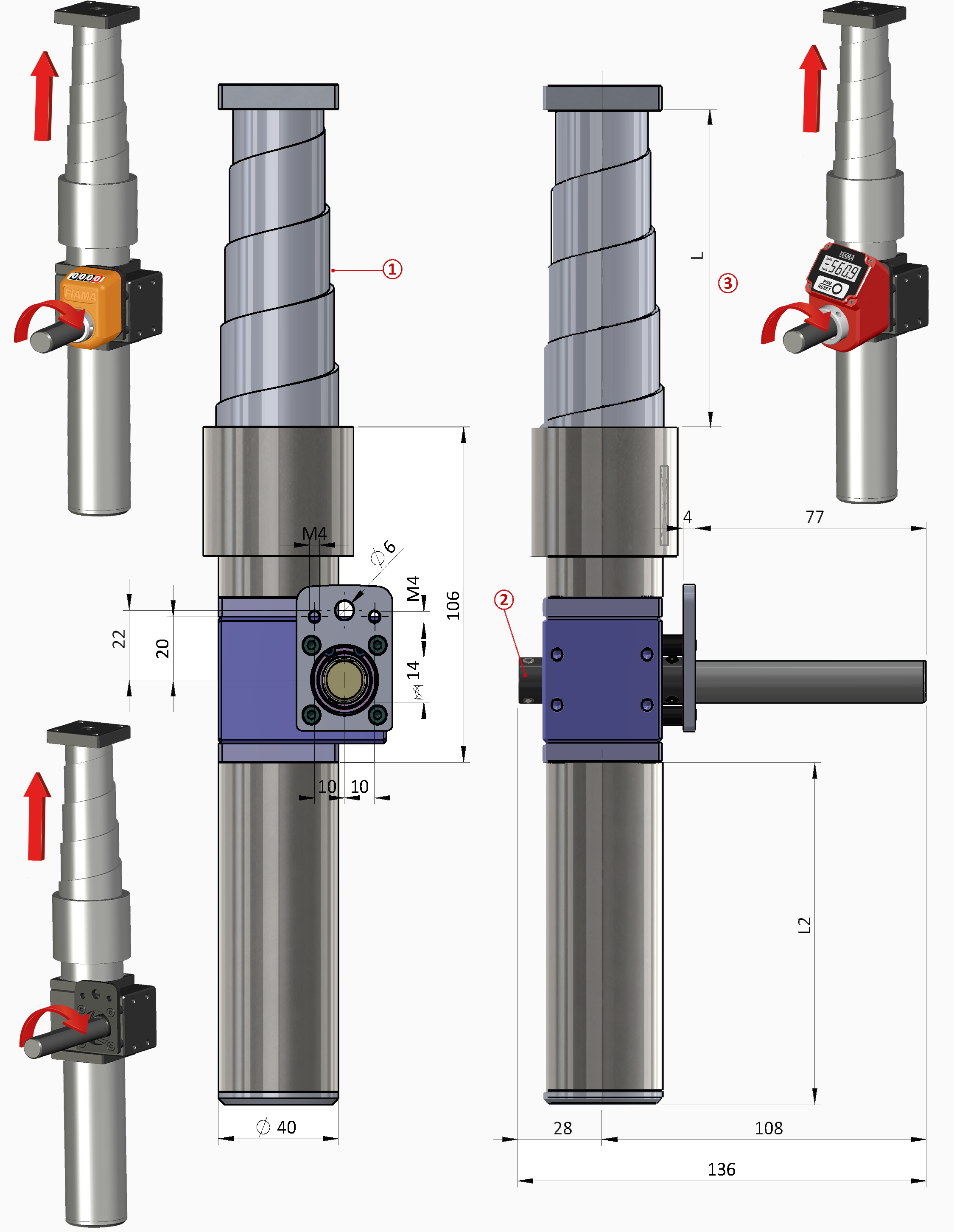
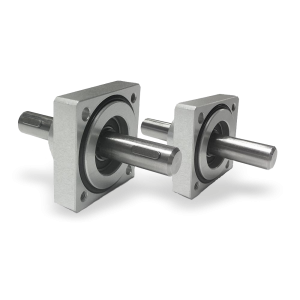
| MAR40 | ||
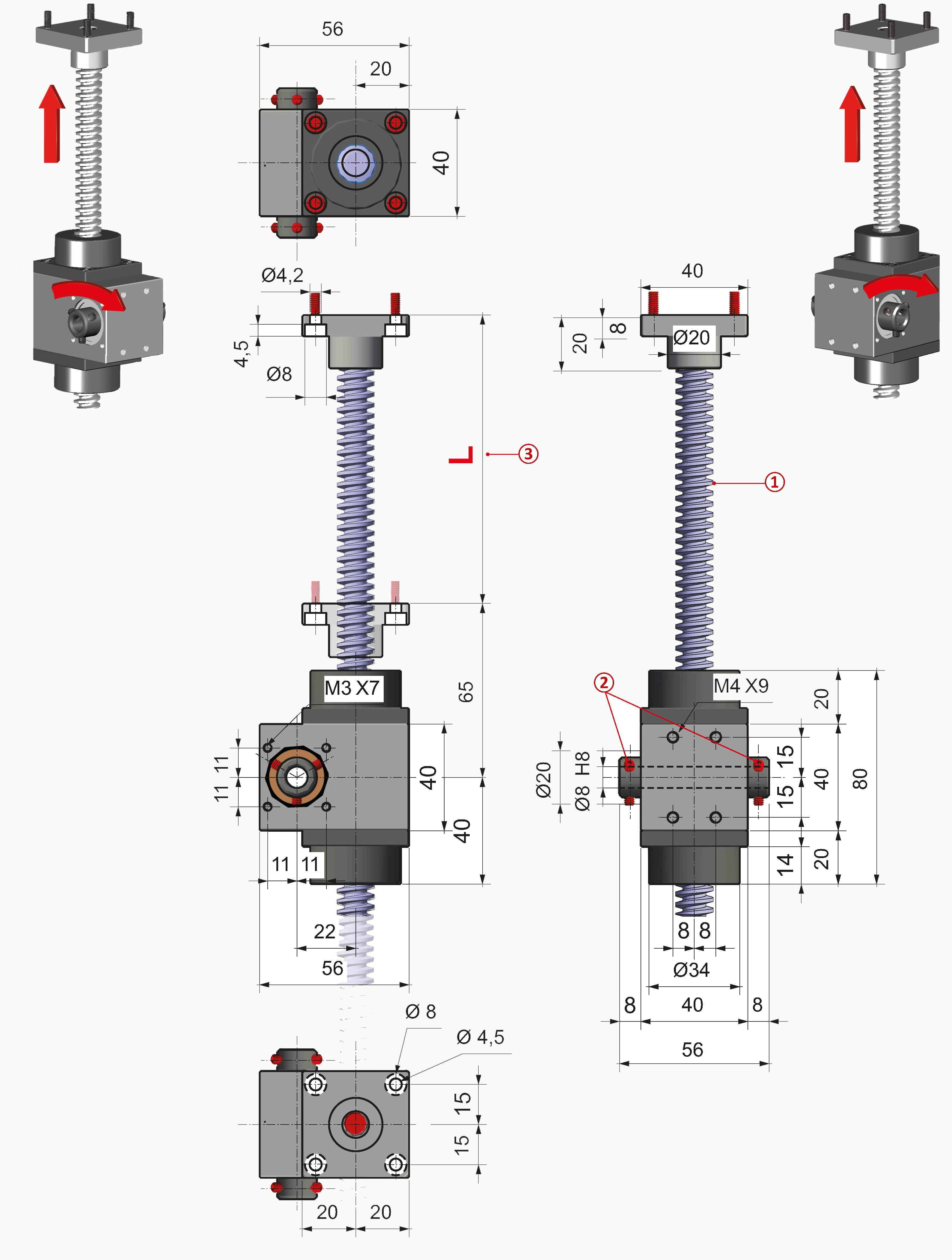 |
||
| 1. Tornillo trapezoidal Ø14 x 4 | ||
| 2. Nr. 3 tornillos de fijación M4 | ||
| 3. Longitud carrera (mm) |
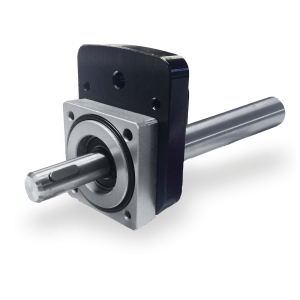
| MAR40 FL-OP3/EP3 completo con brida de fijación y extensión de eje para visualización con indicador digital „OP3“ digital y programable „EP3“ |
 |
| 1. Tornillo trapezoidal Ø14 x 4 |
| 2. Nr. 3 tornillos de fijación M4 |
| 3. Longitud carrera (mm) |
|
MAR40-PROT |
 |
| 1. Tornillo trapezoidal con protección y resorte en espiral |
| 2. Nr. 3 tornillos de fijación M4 |
| 3. Longitud carrera (mm) |
|
MAR40-PROT FL-OP3/EP3 |
 |
| 1. Tornillo trapezoidal con protección y resorte en espiral |
| 2. Nr. 3 tornillos de fijación M4 |
| 3. Longitud carrera (mm) |
| INSTALACIÓN |
| La instalación debe ser realizada de manera de no crear cargamentos radiales/laterales, principal causa di daños, sobre al varilla roscada. La varilla y el plano de fijación del reductor deben ser ortogonales y es necesario verificar la axialidad entre elcargamento y la varilla misma evitando excentricidades. Para la instalación de mas gatos (colegados también con transmisiones) es indispensable que los terminales sean perfectamente alineados para repartir el cargamento de manera uniforme, en este caso es aconsejable el uso de ranuras para absorber las desalineaciones. |
| VERIFICA DIMENSIONAMIENTO |
| • Cargamento (N) = la fuerza aplicada al tornillo trasladante del gato (10 N ≅ 1 kg) |
| • Velocidad de rotación (mm/min) = es la velocidad deseada para el movimiento del cargamento, es buena norma limitar la velocidad de rotación a «max 1500 rpm» en entrada |
| • Carrera (mm) = es la medida lineal necesaria para mover el cargamento, en general coincide con la longitud total de la varilla roscada |
| • Protección (opcional) = es necesaria para proteger la varilla de impuridades, suciedad, cuerpos ajenos y/o montajes y movimientos oscilantes |
| • Momento de torsión (Nm) = Par requerido para el movimiento del cargamento |
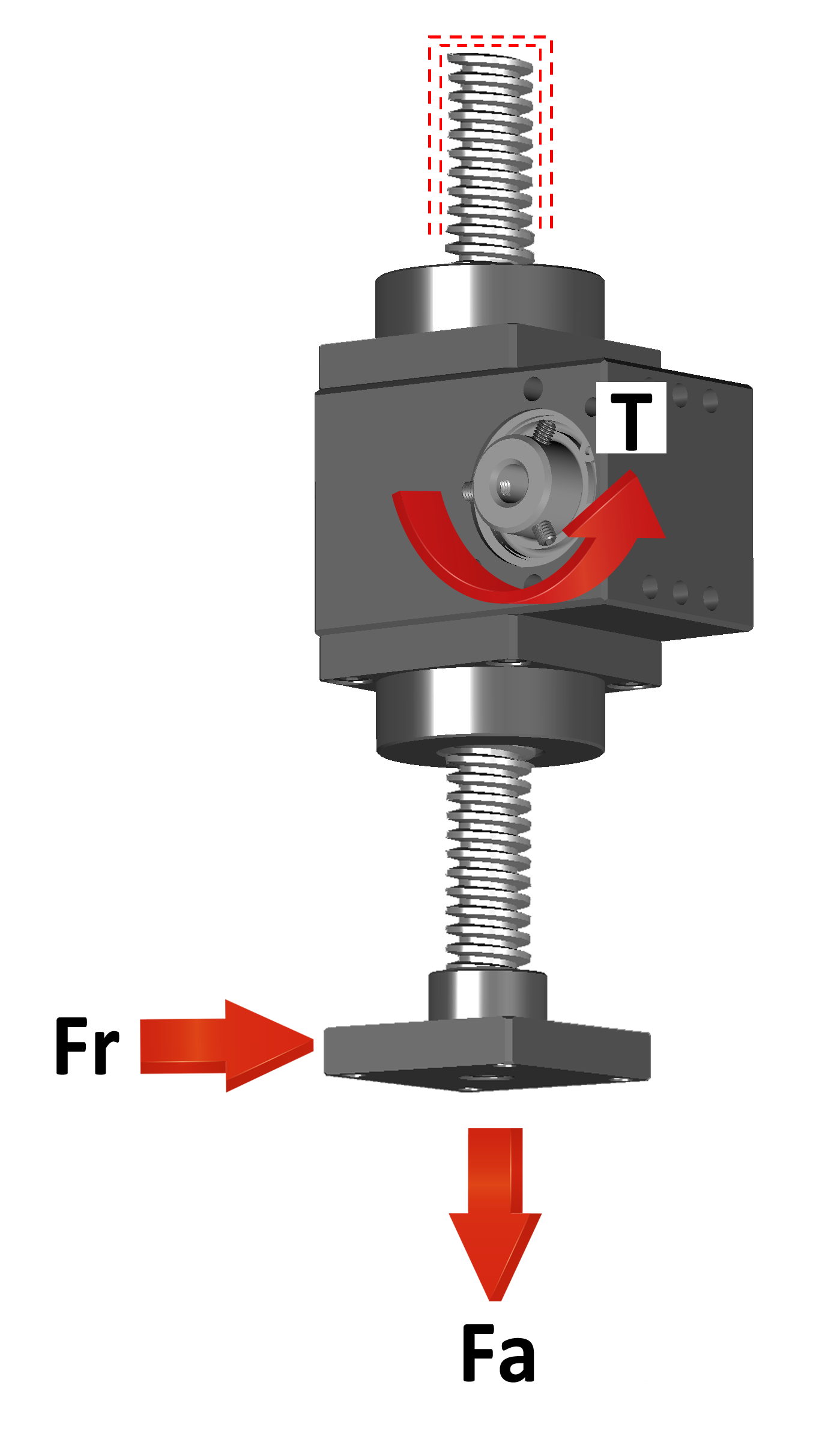
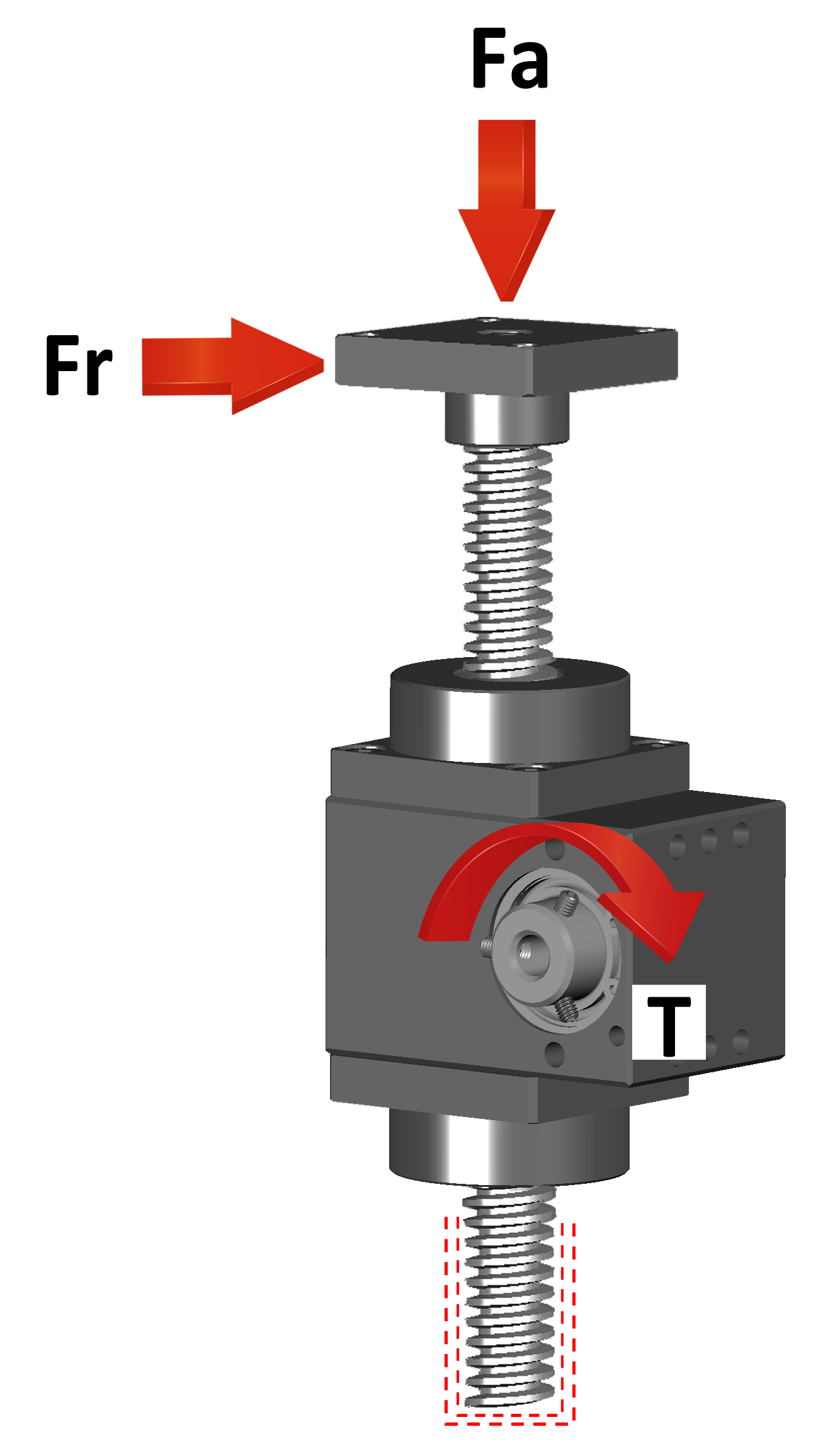
| CARGAMENTO RADIAL Y AXIAL | |
| Las cargas que actúan sobre los árboles pueden ser de dos tipos: radiales ‘FR’ (Fuerza radial) y axial ‘FA’ (fuerza axial) en referencia al eje del árbol mismo; la carga axuak puede ser en tracción o compresión (da especificar en fase de orden de compra). FR - fuerza/cargamento radial actúa en dirección perpendicular al árbol/eje FA - fuerza / cargamento axial actúa en dirección del árbol/eje |
|
| COMPRESIÓN | TRACCIÓN |
 |
 |









Volantito de maniobria con manija rebatible, material thermoplástico, buje de acero.
➜ para obtener información más completa, ver V.R

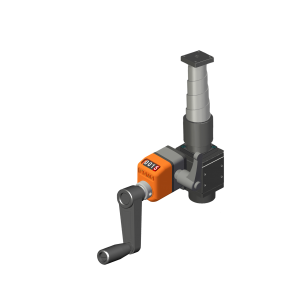
Manivela con manija rebatible, material thermoplástico, buje de acero.
➜ para obtener información más completa, ver V.M

Árboles disponibles Ø6, Ø8, Ø10, Ø14, Ø20.
➜ para obtener información más completa, ver Soportes
Soportes con brida con el eje de extensión de indicadores de posición.
➜ para obtener información más completa, ver Soportes con brida

Las juntas universales articuladas «GC» y «GC» se utilizan para la transmisión de par y movimiento de elementos no alineados.
Características principales: aplicación universal, alta fiabilidad, sin mantenimiento, facilidad de uso, extrema precisión.
• Cuerpo en acero inoxidable AISI303, totalmente mecanizado en macizo.
• Apto para movimientos intermitentes (UI) y continuos (UC).
• Ángulo de trabajo máx. 45 °.

• Los ejes telescópicos son ideales para conectar dos elementos con distancias entre ejes fijas o variables.
• Apto para ajustes y uso continuo.
• Pares de 5 Nm a 10 Nm.
➜ para obtener información más completa, ver ATE

• Los ejes telescópicos son ideales para conectar dos elementos con distancias
entre ejes fijas o variables.
• Apto para ajustes y uso continuo.
• Pares de 25 Nm a 50 Nm.
➜ para obtener información más completa, ver ATS

Los ejes rígidos AR se utilizan para la conexión entre dos ejes perfectamente alineados que no presentan desalineaciones.
Las principales características son la aplicación universal y la alta fiabilidad.
• Apto para accionamientos manuales y motorizados.
• Sencillos y rápidos de montar, no requieren soportes adicionales.
➜ para obtener información más completa, ver AR






Contador a 4 cifras (standard cifra roja para indicar los décimos; a pedido 2 cifras roja para los centésimos o 4 cifras negras para los mm). Lectura hasta 9999. Altura cifras 5mm.
• Orificio estándar ø14H7, otros menores con buje de reducción.
➜ para obtener información más completa, ver OP3
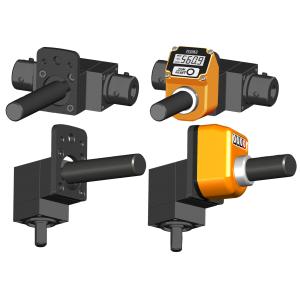
Reenvío angular 66/4 con brida MØ14x68 FL-OP3/EP3, diseñada para la conexión con el indicador de posición. Garantiza ajustes precisos y un monitoreo exacto de la posición, mejorando la estabilidad y la precisión de las lecturas. La brida, fabricada en aluminio anodizado negro, se coordina perfectamente con el cuerpo de la transmisión, ambos con el mismo acabado elegante y resistente.
➜ para obtener información más completa, ver 66/4

El indicador electrónico EP3 permite un ajuste monitorizado a prueba de errores y una detección precisa de la medición lineal o angular.
• 100% intercambiable con el indicador mecánico OP3.
• Montaje simple a través del eje hueco
• Alimentación interna por batería: pila ½ AA de 3,6V con 5 años de duración
➜ para obtener información más completa, ver EP3

● Accionamiento y posicionamiento automático de los ejes en un único dispositivo
● Diseño ultracompacto, montaje sencillo con eje hueco de Ø 14 con llave de 5 mm rebajada.
● Interfaces de salida: Profinet, EthernetIP, PowerLink, EtherCat.
➜ para obtener información más completa, ver SERVO.ALL

La unidad Servo-OP es un actuador eléctrico rotativo que, junto con nuestro indicador OP3 (opcional), permite visualizar la posición, directamente mediante dos botones.
• Cuerpo de aluminio anodizado, dimensiones reducidas
• Reductor con salida de árbol hueco
➜ para obtener información más completa, ver SERVO.OP
Galeria de fotos





Richiedi l'accesso
|
LEYENDA PARA TABLAS DE RENDIMIENTO |
||
|
Tab. 1 |
= |
carga movida según el par de entrada |
|
Tab. 2 |
= |
carga movida según la carrera del tornillo acme (con guías) |
|
Tab. 3 |
= |
velocidad de traslación del tornillo basada en el no. vueltas de entrada |
|
i |
= |
relación de reducción [/] |
|
T |
= |
par [Nm] |
|
C |
= |
carga movida [kg) |
|
s |
= |
corsa |
|
ω |
= |
carrera [mm] |
|
v |
= |
velocidad de traslación [mm/s] |